Blog
Modular Monolith: Integration Styles
Introduction
No module or application in a larger system works in 100% isolation. In order to deliver business value, individual elements must somehow integrate with each other. Let me write here a quote from the book “Thinking in Systems: A Primer”, where Donella H. Meadows defines the system concept in general:
A system is an interconnected set of elements that is coherently organized in a way that achieves something. If you look at that definition closely for a minute, you can see that a system must consist of three kinds of things: elements, interconnections, and a function or purpose.
The concept of systems integration is defined as follows (wiki):
…process of linking together different computing systems and software applications physically or functionally, to act as a coordinated whole.
As you can see from the definitions above, in order to provide a system that fulfills its purpose, we must integrate elements to form a whole. In previous articles in this series, we discussed the attributes of these elements which are, in our terminology, called modules.
In this post, I would just like to discuss the missing part - Integration Styles for modules in Modular Monolith architecture.
Enterprise Integration Patterns book
The title of this post is not accidental. It sounds exactly like Chapter 2 of Gregor Hohpe and Bobby Wolf great book Enterprise Integration Patterns. This book is considered a bible of information about systems integration and messaging. This article takes some knowledge from this chapter and relates it to the monolithic and modular architecture.
In any case, everyone interested in the topic of integration, I invite you to read the book or materials that are available online at https://www.enterpriseintegrationpatterns.com/ site.
Integration Styles
Integration Criteria
Like everything in nature, each Integration Style has its pros and cons. Therefore, we must define criteria on the basis of which we will compare all styles. Then, based on that criteria, we will decide on the method of integration in the future.
We can distinguish the following criteria: Coupling, Complexity, Data Timeliness.
1. Coupling
Coupling is a measure of the degree to which 2 modules are dependent on each other (wiki):
coupling is the degree of interdependence between software modules; a measure of how closely connected two routines or modules are; the strength of the relationships between modules.
If you’ve read the previous posts in the series, you already know that one of the most important attributes of modular design is independence. Therefore, it will be easy to guess that coupling is one of the more important criteria in terms of integration style.
2. Complexity
The second criterion for evaluating the Integration Style is its level of complexity. Some integration methods are simple - require little work, are easy to understand and use. However, others are more complicated, require more commitment, knowledge, and discipline.
3. Data Timeliness
The last criterion is the length of time between when one module decides to share some data and other modules have that data. This means how soon after a state change in a given module, the rest of the modules concerned will take this change into account. Of course, the shorter this time, the better.
Now that we know all the most important criteria, let’s move on to the ways of integrating our modules. Let’s discuss 4 Integration Styles: File Transfer, Shared Database Data, Direct Call and Messaging.
File Transfer
The first option is to integrate our modules using a regular file. Such a file must be exported from the source module and imported into the target module. This can happen in 3 ways:
- manual, where the user manually imports/exports
- automatic, where files are imported and exported automatically by systems
- hybrid, where the file is imported/exported automatically on one side and vice versa on the other
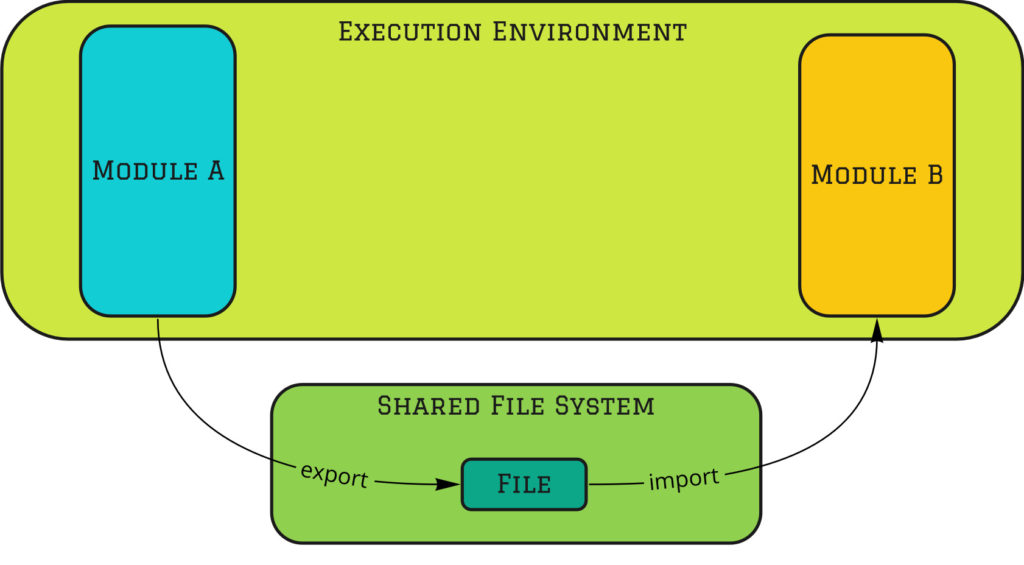
Modular Monolith Integration Styles - File Transfer
One of the main tasks of this type of integration is to determine the format of a given file. What is important, it is the only dependency that two modules integrating in this way have. You can visualize it as a really huge message that is carried over by the filesystem. For this reason, it can be assumed that the coupling is very low in this case.
As for the level of complexity of this approach, it can be evaluated as an average. On the one hand, generating a file in a specific format is not difficult in these times. On the other hand, uploading to a shared resource, managing files, handling duplicates, and so on is more complicated and time-consuming.
From a timeliness point of view, modules integration via files is slow (not to mention manual export/import). Most often it is performed in larger batches at some time intervals (so-called batches), often at night. For this reason, the delay can be a day, a week or more.
To be honest, I’ve seen file-sharing integration many, many times between systems, and probably never in a monolith - which is rather understandable. This Integration Style I have described for the sake of completeness of this topic. The most popular integration method for monoliths is the Shared Database Data.
Shared Database Data
In the EIP book, this method of integration is called Shared Database, but I believe that it is not quite the right name. Sharing the database does not always have to mean sharing data, because modules can store its data in separate tables (most often it is done through database schemas). Therefore, in my opinion, Shared Database Data is a better term.
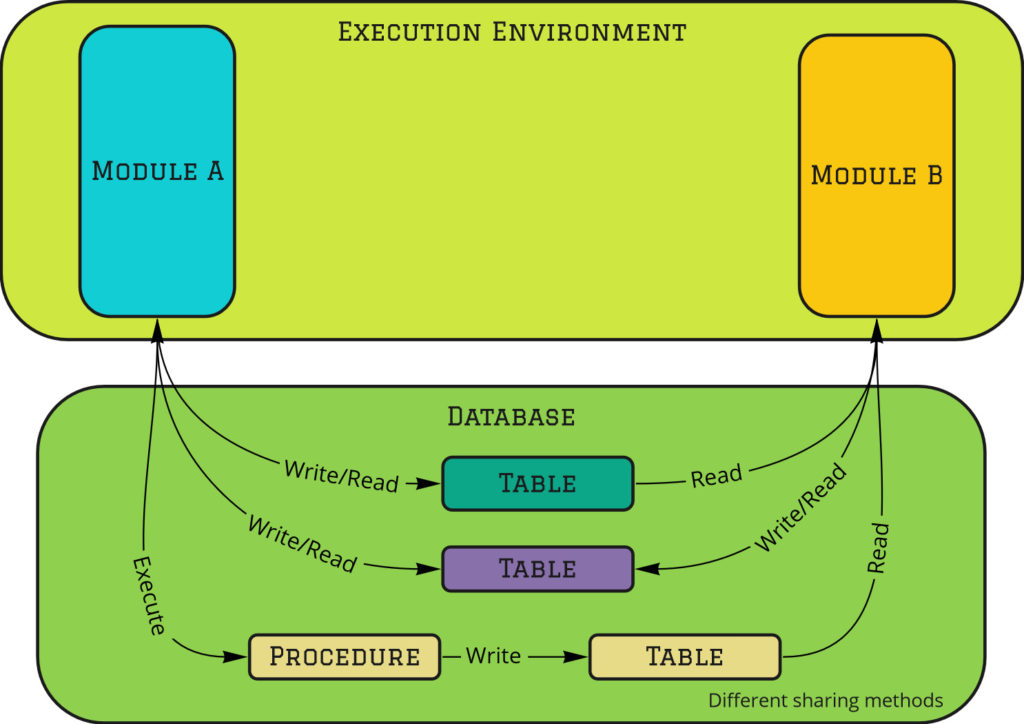
Modular Monolith Integration Styles - Shared Data
In Shared Database Data modules share a certain set of data in the database. In this way, the data are always integrated and consistent with each other because, generally speaking, they are the same data. If module A writes data to table X, module B can read the data immediately after the database transaction is completed.
The level of complexity of such a solution is very small. Nowadays every application/module needs a database, so there is no need to add anything extra with this approach.
The solution looks perfect at first glance. However, its biggest disadvantage is a very high coupling. By sharing data, modules share their state which couples them together. The high coupling means no autonomy for the module. In addition, one little change to database structure or even data itself can break another module without notice. It implies that each change to the database must be consulted and coordinated. This way database becomes bottle-neck of changes. The whole solution is not evolutionary anymore.
The shared state has another significant disadvantage - it is very hard or even impossible to create one, unified data model which will ensure that the requirements of all modules are met. The attempt to unify most often ends with a very weak, ambiguous model that is difficult to understand, develop and maintain.
To reduce coupling while still maintaining the same level of data timeliness we can use Direct Call.
Direct Call
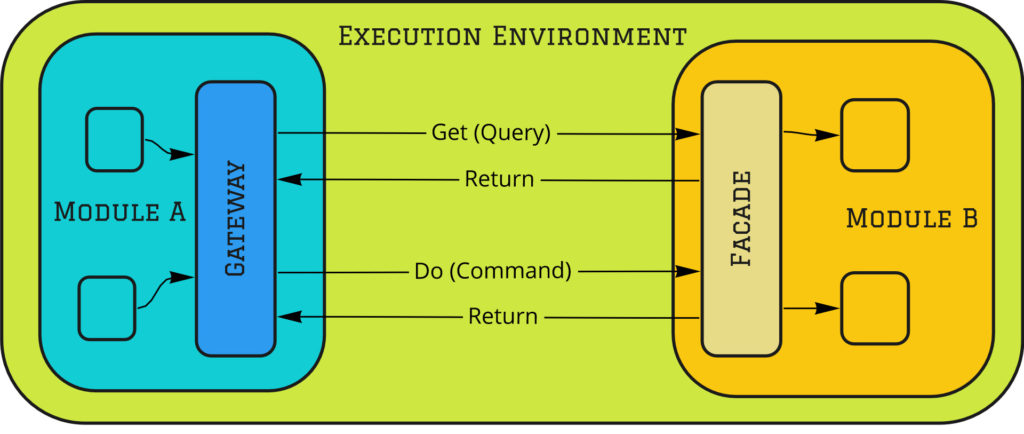
The third option is to directly call the method of the module we’re integrating with. In this case, we use the encapsulation mechanism. The module exposes only what is needed. The whole behavior is closed in a method. In this way, the state of our module is not exposed to the outside as it is in the case of the Shared Database Data approach. Thanks to this, the caller is not able to break anything from the outside.
“Modular Monolith Integration Styles - Direct Call
Not sharing the data implies that each module has its own data set. It can be the same database broken down by schemas or each module can have even a separate database created in different technology. In a scenario with one database, it is important to keep the data really in isolation. It means no constrains between tables from separate modules and no transactions between them.
Both the caller and the callee should treat each other as external. Both modules will use a different language and have different concepts modeled. Therefore, the Anti-Corruption Layer (ACL) should be applied. On the caller side, it could just be a gateway, on the callee side a facade. Thanks to this, modules encapsulation are kept.
In the case of a distributed system, the Direct Call is known as Remote Procedure Invocation/Call (RPI/RPC). Unfortunately, this technique is very often used in Microservice architecture and can lead to the so-called Distributed Monolith anti-pattern architecture. As the call is always synchronous, we are dealing with temporal coupling. Both caller and calle must be available in the same time. In the case of a monolith, it is not a problem because this is its nature, in the case of microservices it is much worse - it reduces architecture quality attributes like autonomous development and deployment. Read other article in this series about architectural drivers for more details.
The Direct Call Integration Style seems to be a very good choice when it comes to integrating our modules, but has some drawbacks too. First, the call is synchronous, so the caller has to wait for the result. Second, the calling module needs to know about the module it is calling, it has to have a direct dependency. Moreover, it has to know the intent of what it wants to do. Coupling is lower than in Shared Database Data, but still exists. If we want to avoid these drawbacks, we can use the last integration style: Messaging
Messaging
The File Transfer integration style has a great advantage - it does not create dependencies between modules. However, it has a big drawback - the data timeliness in most cases is unacceptable. Messaging does not have this disadvantage. The data timeliness is not so good as in the case of Direct Call because it is asynchronous communication, but it can be safely said that it is very good and acceptable in most cases.
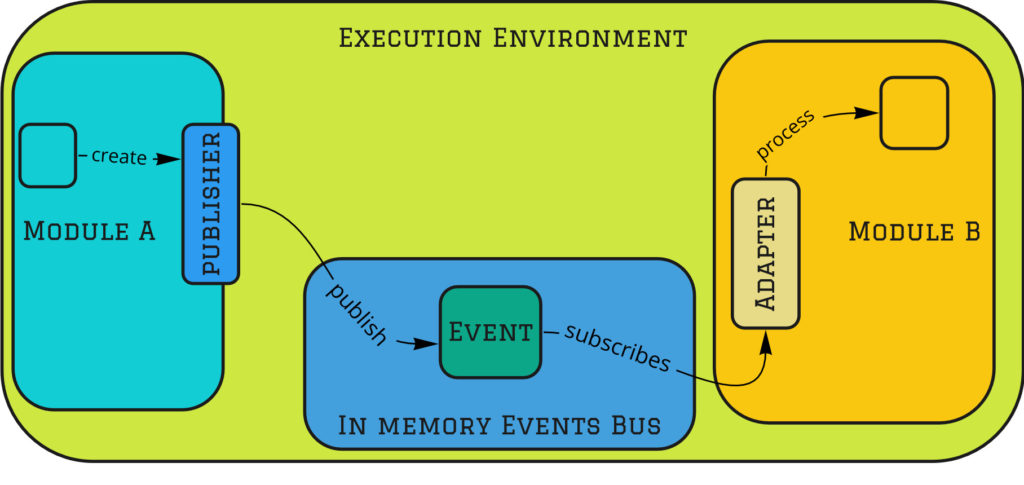
Integration Styles - Messaging (in memory)
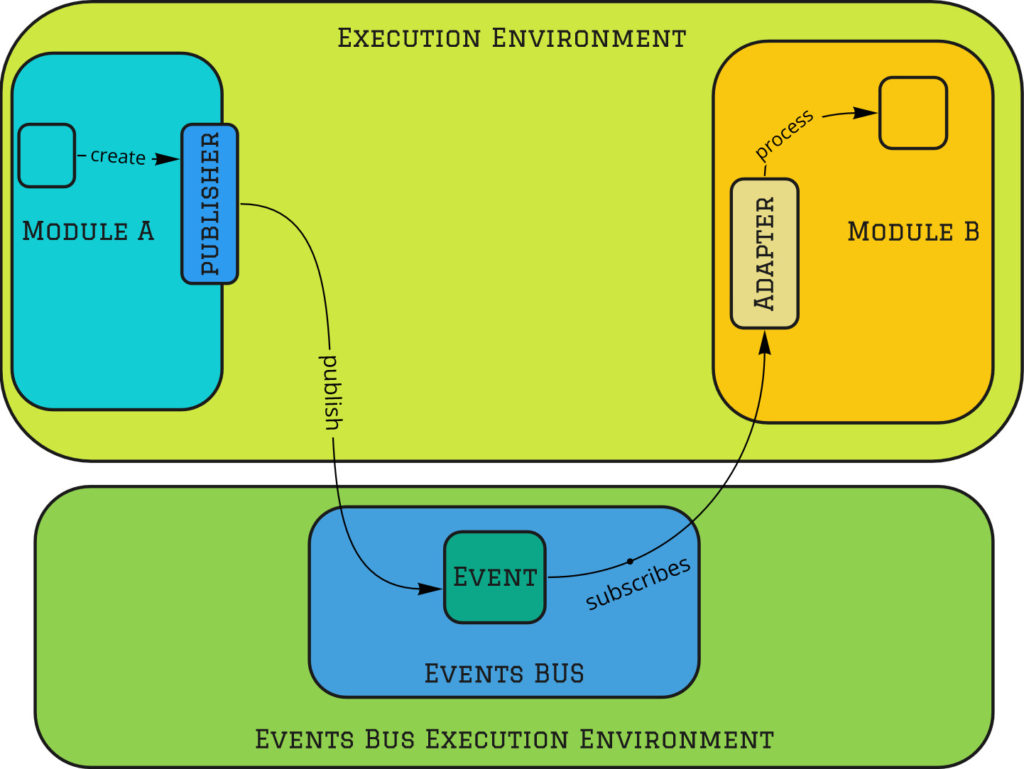
Integration Styles - Messaging (separate process)
Appropriate use of Messaging for the implementation of Event-Driven Architecture causes no dependency between modules. Modules integrate through events. However, these are not Domain Events because a domain event is local and should be encapsulated in a given Bounded Context. Integration Events contain only as much as needed to avoid the so-called Fat Events. Integration Events should be as small as possible, as they are part of the contract made available by the given module. As you know, the smaller the contract, the more stable it is -> the less frequently other modules have to change.
In addition, asynchronous processing, that causes Eventual Consistency, on the other hand supports performance advantages, scales better and it is more reliable.
What are the disadvantages of Messaging? First, due to the nature of asynchronicity, the state of our entire system can be eventually consistent as described above. That is why it is so important to have the boundaries of the modules well defined. This is almost as important as in Microservices architecture, but the advantage of the Modular Monolith architecture is that it is much easier to change these boundaries.
The second disadvantage of Messaging is that it is more complex. To provide asynchronous processing and Event-Driven Architecture, we’re going to need some sort of Event Bus. It can be an in-memory broker or a separate component (eg RabbitMQ). In addition, we will also need job processing mechanisms for internal processing - outbox, inbox, internal commands messages. There is need to write some of this infrastructure code. Fortunately, this is a generic problem - we do it only once and there are a lot of libraries and frameworks which support this.
Comparison
Below I present a comparison of all 3 Integration Styles taking into account 3 criteria - Coupling, Data Timeliness and Complexity.
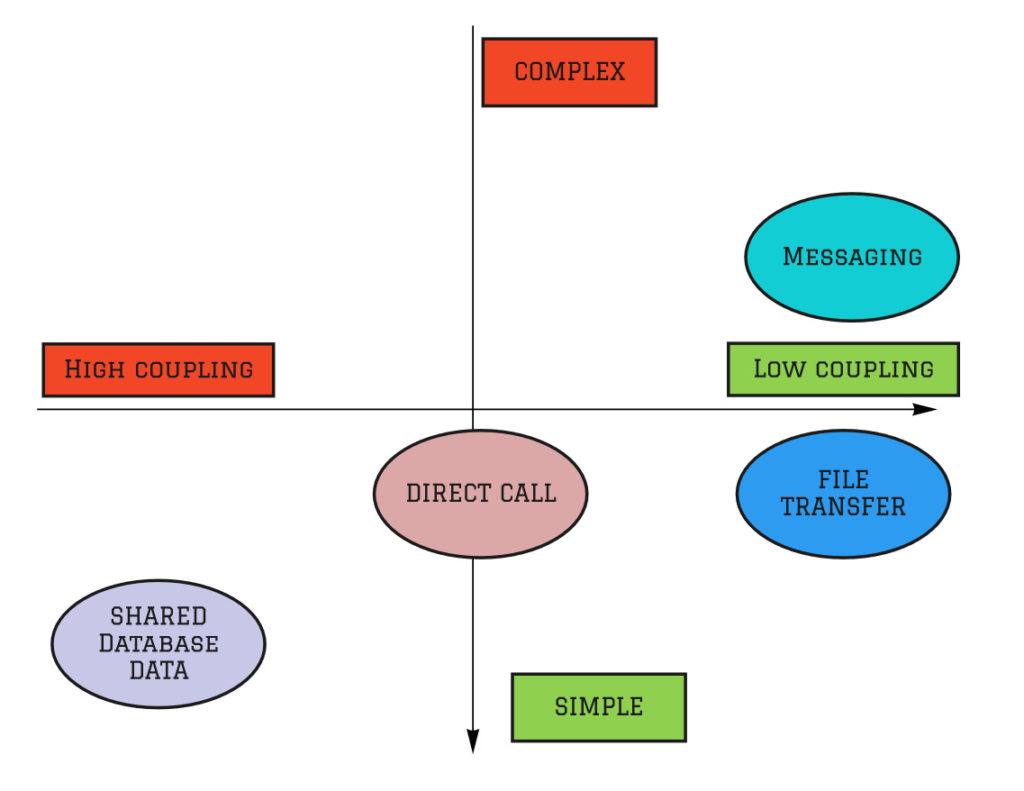
Comparison - Coupling vs Complexity
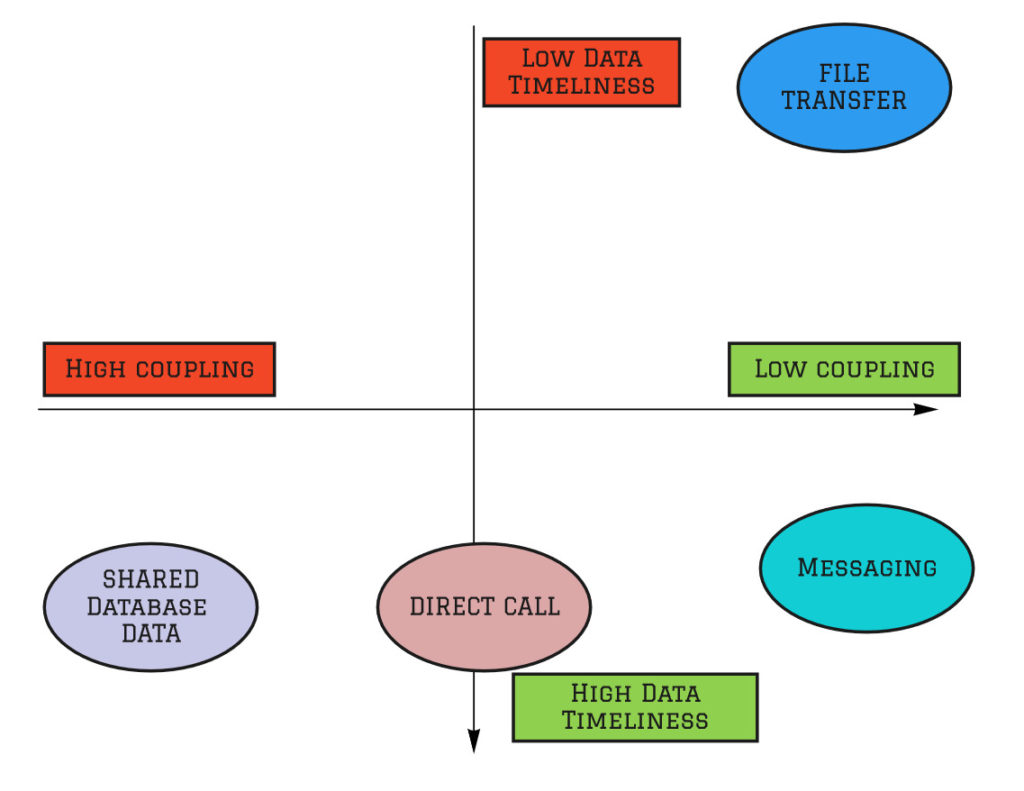
Comparison - Coupling vs Data Timeliness
What can we deduce from these diagrams? First of all, there is no one perfect style. Fortunately, we can see some heuristics:
- If the system is very, very simple (essential complexity is low) and you do not care about modularity: choose simplicity and use Shared Database Data style.
- If the system is complex (essential complexity is high) you must care about modularity. Options are:
- choose Messaging if you prefer highest level of autonomy and eventual consistency between modules is acceptable
- choose Messaging if you care a lot about performance, reliability, scalability
- choose Direct Call if you must have strong consistency, don’t need maximum level of modules autonomy or Data Timeliness is the primary factor.
Additionally, you can mix different styles. Most often, when we are talking about modular architecture, it is best to use Direct Call and Messaging together. Some modules can communicate synchronously and some asynchronously, depending on the need.
Summary
As I mentioned at the beginning, no module, component, or system lives in complete isolation. We must follow the “Divide and Conquer” principle so we divide our solution into smaller parts, but finally - we have to integrate these parts together to create a system.
Let’s summarize all 4 styles again:
- File transfer - provides low coupling but has almost always unacceptable data timeliness so it is impractical in the monolith
- Shared Database Data - the simplest, quick, but couples modules together
- Direct Call - provides lower coupling than Shared Database Data, encapsulates modules, relatively simple
- Messaging - ensures the lowest coupling, modularity, autonomy but at the cost of complexity
Which Integration Style to choose? Everything, as usual, “it depends”. However, I hope that I managed to at least to some extent explain what it depends on. No silver bullet, again.
More in series
This post is part of the Modular Monolith series:
Comments
Related posts See all blog posts


